

Justin Willock
Project Details
2023 / Arduino / Robot
Role:
Design, Testing, and Building
Date:
May 2023 – Present
Design Objectives
- Autonomous Gutter Cleaning: Develop a robot capable of independently cleaning gutters without human intervention.
- Energy Independence: Ensure the unit operates autonomously without reliance on external power sources.
- Optimal Timing Recognition: Implement algorithms for the robot to identify and execute cleaning tasks at the most efficient times.
- Efficient Cleaning and Clog Prevention: Create mechanisms to effectively clean gutters and prevent clogs.
- Compact and Lightweight: Design the robot to be small in size and lightweight for ease of handling and maneuverability.”
Initial Thoughts and Ideas
It needs to move!
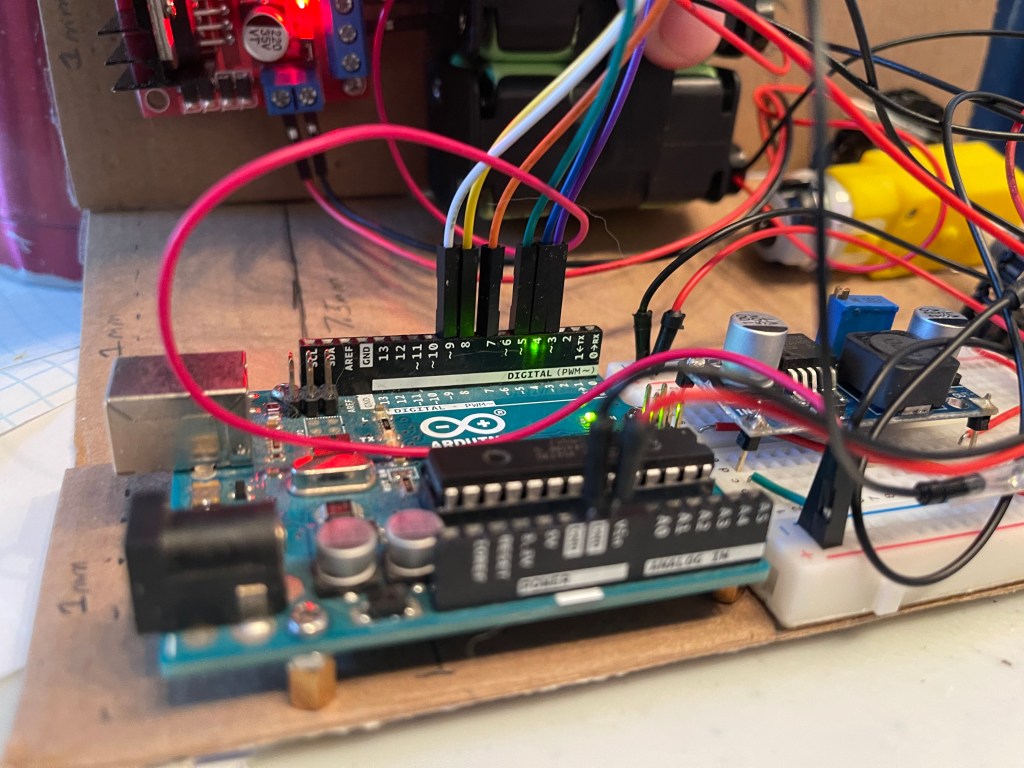
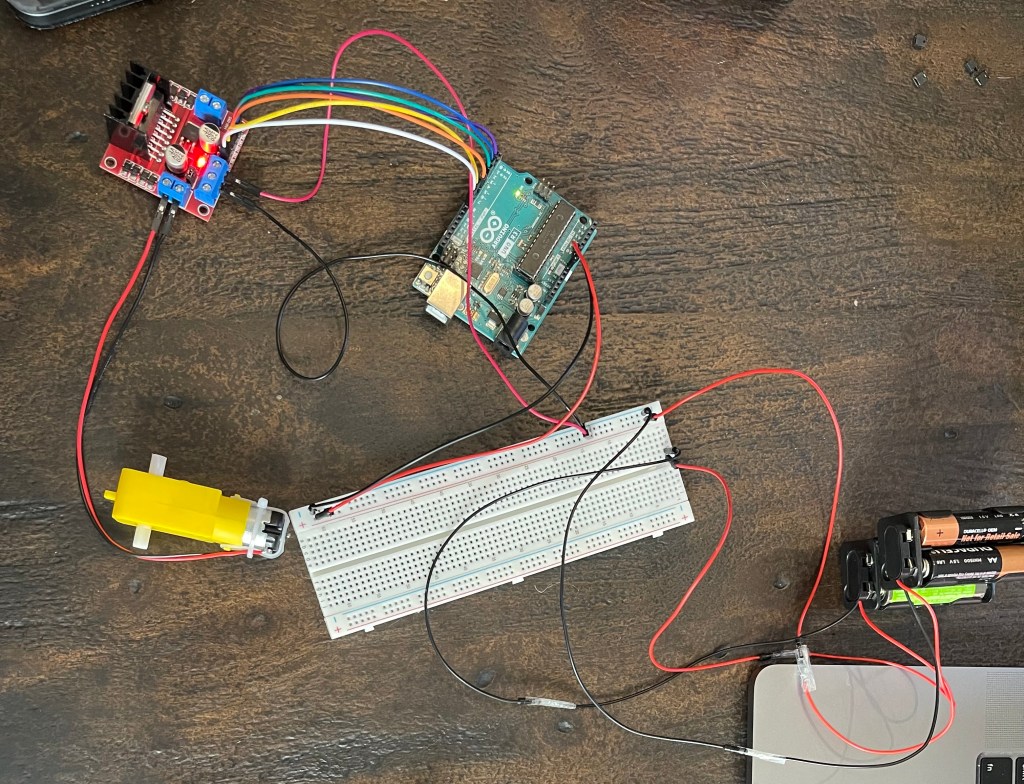
To move the robot I opted to use a 3V – 12V geared DC motor driven by a L298N Motor Driver Board and controlled by an Arduino UNO R3 (this links to an Arduino R4 Minima which is the cheaper drop in replacement) at least for now. All of the previously mentioned devices were powered by the same four 1.2V 2400 mAh Amazon Basics 4-Pack Rechargeable AA NiMH Batteries connected in series.
Now the issue is: how will it be driven? The original idea was there would be two sets of something resembling tank treads. One on each sidewall of the gutter held in place by springs. Due to space constraints this idea did not work out because as temporary treads I used lego technical treads.
My next strategy was to put the treads underneath the robot but the axels would not fit within the constraints. The issue was compounded by the fact that I needed a suspension system to keep the body of the robot elevated above the treads. When I tried to go without suspension the treads would rip right off.

My most recent attempt was to attach the motor to some lego gears with rubber bands hot glued to them for traction which was shockingly effective.
Moving On
I will be working on making a more professional housing using a 3D printer I recently received. After I fully solve the issue of making it move, I also need to come up with a way to clear debris.
There are two approaches I can think of right now, the first is a conveyor belt that just drops debris out of the gutter, and my other thought is a fast spinning rubber attachment that flings debris out of the gutter. After I sort both of those issues out I will need to learn how to recharge my nickel metal hydride batteries using solar.
Finally I have to make it sense the optimal time to clean the gutter (probably just by sensing when it rains and going then). One large restriction I have however, is I do NOT want this robot to use a wifi connection or have a dedicated smartphone app. I want the end product to be simple, and not a hassle for the owner.

One response to “Autonomous Gutter Cleaning Robot Design Objectives and Progress”
I love how this is progressing, very well written, I was easily able to follow along. I can’t wait to see the finished project!
LikeLiked by 1 person